
Uvod u funkciju filtra u Matlabu
Ova funkcija filtrira podatkovni niz pomoću digitalnog filtra, a izlaz filtriranja je u osnovi izglađivanje ili oštrenje signala (eliminirajući određeni frekvencijski raspon). Izravna je iz II implementacije signala (standardna jednadžba razlika). Postoje četiri načina za predstavljanje filtera u Matlabu:
- Izlaz = filtar (koef. B, koef. A, x)
- Izlaz = filtar ((b, a, x, z)
- Filter (b, a, x, z, dim)
- F, zf = filter ()
Sintaksa i primjeri
Ispod su sintaksa i primjeri funkcije filtra u Matlabu:
1. Izlaz = filtar (koef. B, koef. A, x)
- Ovo modeliranje koristi racionalnu funkciju prijenosa na ulaznom signalu 'x'. U gornjoj jednadžbi a i b su koeficijenti brojača i nazivnika signala.
- U ovom slučaju, obavezno je da je (1) jednak, normaliziramo koeficijent na 1 da bismo zadovoljili ovaj uvjet, a (1) ne bi trebao biti jednak nuli, samo tako možemo normalizirati koeficijent.
- Izlaz filtra ovisi o vrsti ulaza 'x'.
- Ako je ulaz 'x' vektorski, tada dobivamo izlaz 'z' kao vektor.
- Ako je ulazni signal 'x' matričan, tada dobivamo izlazni signal 'z' u odnosu na svaki stupac.
- A ako je to višedimenzionalni signal, tada ćemo dobiti izlaz s obzirom na prvi niz.
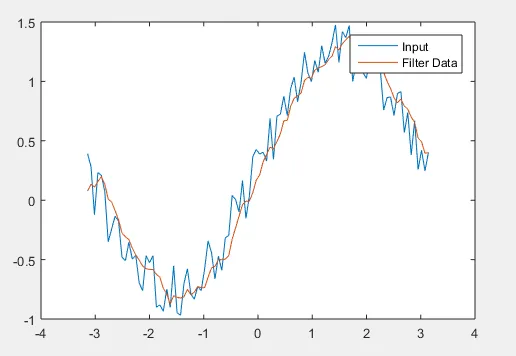
Primjer
T = linspace(-pi, pi, 100 );
X = sin( t ) + 0.50 * rand ( size( t )) ;
w_size = 5;
b = ( 1 /w_size ) * ones( 1, w_size ) ;
a = 1 ;
f = filter ( coeff b, coeff a, x ) ;
plot ( t, x )
hold on
plot ( t, f )
legend ( 'Input ', 'Filter Data')
Izlaz:
2. F = filter ((b, a, x, z)
- Ako u dizajniranju postoje ograničenja memorije, neki filtri uzimaju u obzir početno i konačno stanje.
- Ti filtri stvaraju velike podatke i dijele ulaz u dva segmenta.
Primjer
x = randn( 110000, 1 ); - - - creation of input sequence x (1 to 110000)
x1 = x ( 1 : 51000 ) ; - - - splitting the seq. x1= 1 to 51000
x2 = x ( 51001 : end ) ; - - - second seg is x2 = 51000 to 110000
b = ( 4, 3 ) ; - - - numerator coefficient
a = ( 1, 0.4 ) ; - - - denominator coefficient
( f1, zf ) = filter ( b, a, x1 ) ; - - - filter function
f2 = filter ( b, a, x2, zf ) ; - - - filter function
f = filter ( b, a, x ) ; - - - filter function
isequal( f, ( f1 ; f2 ) ) - - - filter function matching
Izlaz:
Izlaz gornjeg koda je 1 što znači logički 1, logički 1 je istinsko stanje.
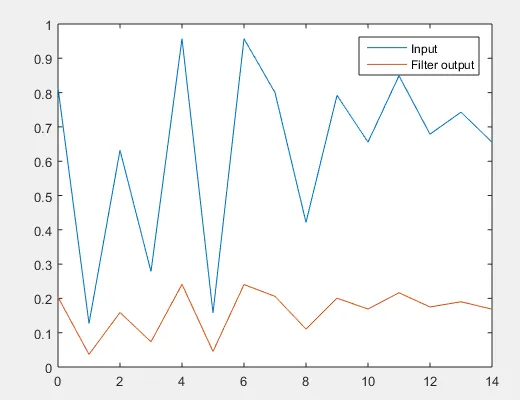
3. Filter (b, a, x, z, dim)
Ova vrsta filtera koristi se za oblikovanje ulaza i izlaza matrice.
Primjer
rng default
x = rand ( 3, 10 ) ; - - - creation of input sequence 3 by 10
b = 1 ; - - - coefficient of numerator
a = ( 4 -0 .1 ) ; - - - coefficient of numerator
f = filter ( b, a, x, ( ), 2 ) ; - - - filter function
t = 0 : length (input seq. )-1 ;
plot ( t, x ( 1, : ) ) - - - input signal
hold on
plot ( t, f ( 1, : ) ) - - - output signal
legend('Input ', 'Filter output')
Izlaz:
4. F, zf = filter ()
Ako postoji ograničenje memorije, tada se koristi ova vrsta filtra, koristi početne i završne uvjete i dijeli ulazni signal na dva segmenta.
Primjer
x = randn ( 110000, 1 ) ; - - - create random signal
x1 = x ( 1 : 51000 ) ; - - - splits signal from 1 to 51000
x2 = x ( 51001 : end ) ; - - - second input signal 51001 to 110000
b = ( 6, 3 ); . - - -numerator coefficient
a = ( 1, 0.9 ) ; - - - denominator coefficient
( f1, zf ) = filter ( b, a, x1 ) ; - - - filter function
f2 = filter ( b, a, x2, zf ) ; . - - - filter function
f = filter ( b, a, x) ; - - - .filter function
isequal ( f, ( f1 ; f2 ) ) - - - output signal matching
Izlaz:
Izlaz gornjeg signala je logičan 1 što znači da je uvjet istinit.
Zaključak - Funkcija filtra u Matlabu
Funkcija filtra uglavnom se koristi za primjenu filtra s pomičnim prosjekom. Pomični prosječni filtriranje najjednostavnija je i najčešća metoda izglađivanja. filtriranje se koristi i za uklanjanje buke.
Preporučeni članci
Ovo je vodič za funkciju filtra u Matlabu. Ovdje smo raspravljali o uvođenju i različitim primjerima funkcije filtra u matlabu zajedno sa njegovom sintaksom. Možete pogledati i sljedeće članke da biste saznali više -
- Ugrađene funkcije u Matlabu
- Prijenosne funkcije u Matlabu
- Anonimne funkcije u Matlabu
- MATLAB pitanja za intervju
- MATLAB funkcije
- Kompletnik Matlab | Primjene Matlab sastavljača